

Fig1. Schematic description of the general organization of a type 2 HBMI.

Fig2. The exoskelaton suit let's the user control movement through thought. Photo credit: The Walk Again Project.
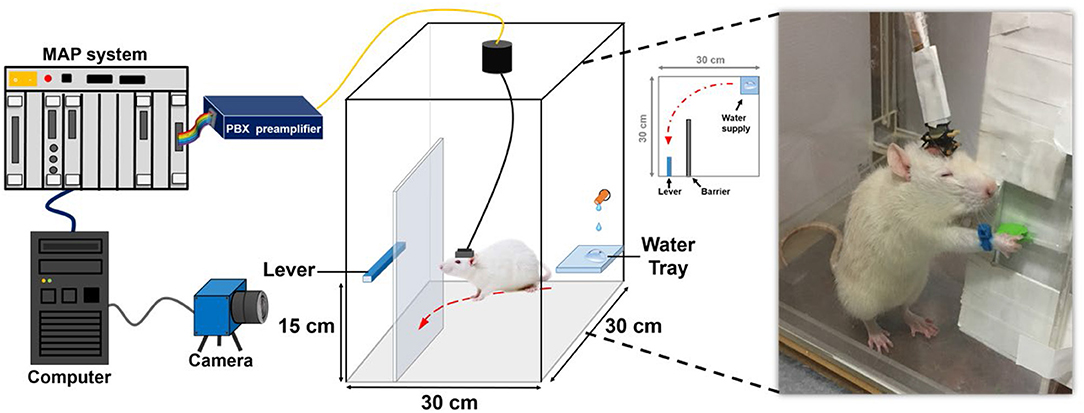
Fig3. System architecture and experimental setting of the water-reward lever-pressing task.
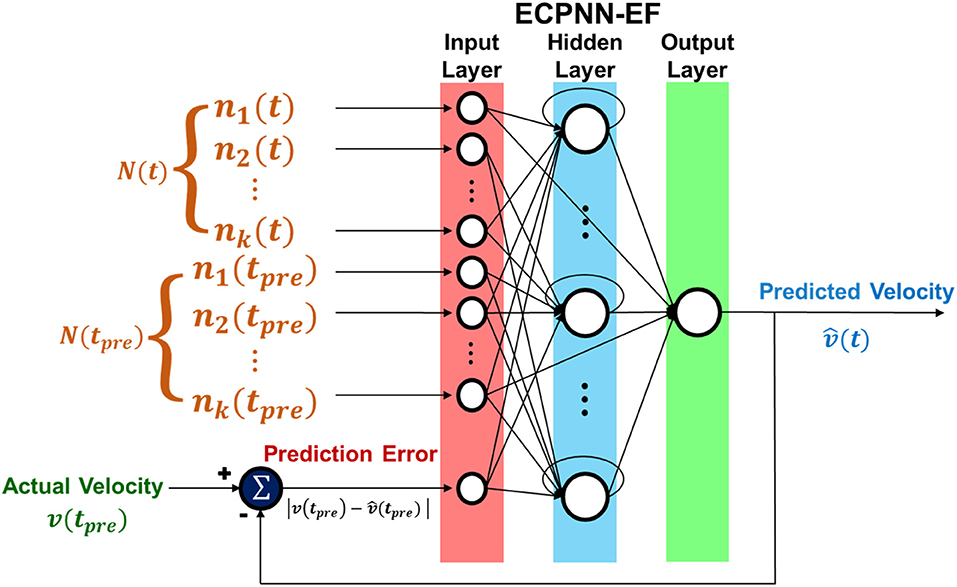
Fig4. Structure of ECPNN-EF
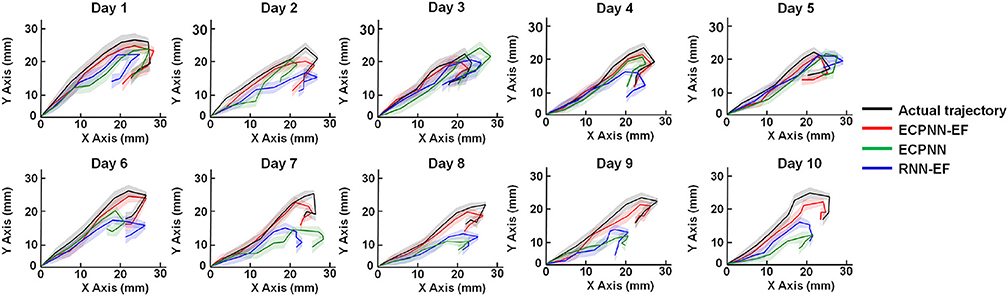
Fig5. Data visualization of average predicted trajectories of the ECPNN-EF, ECPNN, and RNN-EF.